مقدمه:
موتورهای القایی AC عمومی ترین موتورهایی هستند که در سامانه های کنترل حرکت صنعتی و همچنین خانگی استفاده می شوند. طراحی ساده و مستحکم، قیمت ارزان، هزینه نگهداری پایین و اتصال آسان و کامل به یک منبع AC از امتیازات اصلی موتورهای القایی AC هستند.
تاریخچه:
موتور القایی در سال 1882 توسط نیکولا تسلا در فرانسه اختراع شد اما در سال 1888 و پس از نقل مکان تسلا به ایالات متحده به طور رسمی ثبت شد. موتور القایی روتور قفسی یک سال بعد توسط میخاییل دولیو دوبرولکسی در اروپا اختراع شد. پیشرفت در زمینه تولید این موتورها تا جایی ادامه یافت که در سال 1976 موتوری القایی با قدرت خروجی 100 اسب بخار با حجمی برابر موتور 7.5 اسب بخار سال 1897 ساخته شد. از پر کاربردترین موتورهای القایی، موتور هایی با روتور قفس سنجابی می باشند.
ساختار موتورهای القایی:
موتورهای القایی AC یک قسمت ثابت بیرونی به نام استاتور و یک قسمت متحرک در داخل به نام روتور دارند که میان آن دو یک فاصله دقیق کارشناسی شده وجود دارد.
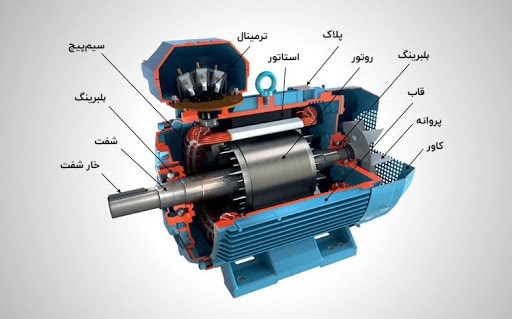
استاتور:
استاتور از چندین قطعه باریک آلومینیوم یا آهن سبک ساخته شده است. این قطعات به صورت یک سیلندر تو خالی به هم منگنه و محکم شده اند (هسته استاتور). سیم پیچ هایی از سیم روکش دار در این شیارها جاسازی شده اند و با زاویه 120 درجه نسبت به یکدیگر قرار گرفته اند.
هر گروه پیچه با هسته ای که آن را فرا گرفته یک آهنربای مغناطیسی (با دو پل) برای کار کردن با تغذیه AC شکل می دهد. تعداد قطب های یک موتور القایی AC به اتصال درونی پیچه های استاتور بستگی دارد.
پیچه های استاتور مستقیماً به منبع انرژی متصل اند. آن ها به صورتی متصل اند که با برقراری تغذیه AC یک میدان مغناطیسی گردان تولید می شود.
روتور:
به قسمت داخلی و متحرک که به محور موتور متصل است و در اثر میدان مغناطیسی دوار استاتور گشتاور تولید می کند، روتور می گویند. روتور از چندین قطعه مجزای باریک فولادی که میانشان میله هایی از مس یا آلومینیوم تعبیه شده، ساخته شده است.
انواع موتور های القایی:
براساس تعداد فازها:
1.موتور القایی سه فاز ( خود راه انداز)
یک موتور سه فاز القایی AC تنها نوعی است که در آن میدان مغناطیسی دوار به طور طبیعی به وسیله استاتور به خاطر طبیعت تغذیه گر آن تولید می شود. به همین دلیل به آن خود راه انداز می گویند. در حالی که موتورهای DC به وسیله ای الکتریکی یا مکانیکی برای تولید این میدان دوار نیاز دارند.
- 2. موتور القایی تک فاز ( غیرخود راه انداز)
یک موتور تکفاز القایی AC نیازمند یک وسیله الکتریکی خارجی برای تولید این میدان مغناطیسی چرخشی است. به همین دلیل به آن غیر خود راه انداز می گویند.
براساس نوع روتور:
- موتور القایی روتور قفس سنجابی
رایج ترین نوع روتور، روتور قفس سنجابی می باشد. تقریباً 90 درصد از موتورهای القایی دارای روتور قفس سنجابی می باشند و این به خاطر آن است که این نوع روتور ساختی مستحکم و ساده دارد. این روتور از هسته ای چند تکه استوانه ای با محوری که شکافهای موازی برای جا دادن رساناها درون آن دارد، تشکیل شده است. هر شکاف یک میله مسی یا آلومینیومی یا آلیاژی را شامل می شود.
- موتور القایی روتور سیم پیچی شده
موتورهای روتور سیم پیچی گران تر هستند و به علت استهلاک حلقه های لغزان دارای هزینه تعمیر و نگه داری بالاتری نیز هستند. در روتور سیم پیچی شده، مقاومت سر راه روتور قابل تغییر است. از کاربرد های این روتور در سرعت متغیر است. در این روتور ها تعداد قطب در روتور و استاتور برابر است و خروجی هر فاز به طور جدا و به وسیله حلقه های لغزنده از موتور خارج شده است.
نحوه ی عملکرد موتورهای القایی:
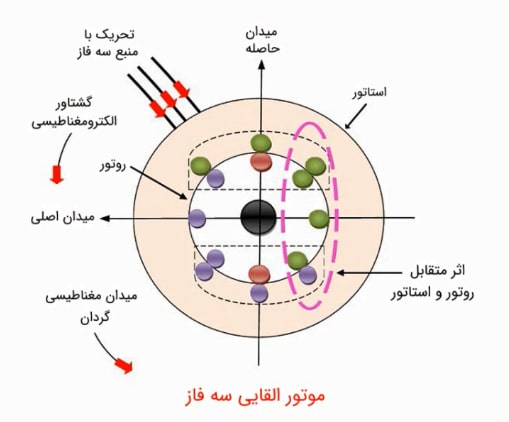
به طور مجازی همه موتورهای الکتریکی از میدان مغناطیسی دوار برای چرخاندن روتورشان استفاده می کنند. موتور القایی یک موتور تحریک یگانه است. منبع تغذیه فقط به یک بخش یعنی استاتور وارد می شود. تحریک به معنی القای میدان مغناطیسی در بخش های مختلف موتور است.
وقتی منبع سه فاز به استاتور اعمال شود، موجب تولید یک میدان مغناطیسی گردان می شود که به صورت پادساعتگرد می چرخد. پلاریته های میدان مغناطیسی متحرک است و تغییر پلاریته باعث چرخش میدان مغناطیسی می شود. هادی های ثابت روتور، میدان مغناطیسی چرخان استاتور را قطع می کند و به دلیل القای الکترو مغناطیسی، نیروی محرکه الکتریکی یا EMF در روتور القا می شود. مدار هادی های روتور، توسط حلقه های انتهایی یا با کمک مقاومت خارجی بسته می شود. حرکت نسبی بین میدان مغناطیسی گردان و هادی روتور، جریانی را در هادی های روتور القا می کند. به محض آنکه جریان در روتور برقرار شود، شار در آن القا می شود. جهت شار روتور مشابه با جهت جریان آن است.
دو شار ایجاد شده ناشی از روتور و استاتور باهم فعل و انفعالات دارند. در یک سر هادی شارها یکدیگر را حذف می کنند و در سر دیگر چگالی بالا می رود. به همین دلیل شار با چگالی بالا هادی روتور را به سمت چگالی کمتر حرکت می دهد و باعث ایجاد گشتاور در هادی می شود. جهت گشتاور با میدان مغناطیسی یکسان است. بنابراین روتور در همان جهت شروع به چرخیدن می کند. سرعت روتور همواره کمتر از سرعت میدان مغناطیسی می باشد به همین دلیل به موتور القایی، موتور آسنکرون یا غیر همزمان هم می گویند. روتور تلاش می کند در سرعت سنکرون بچرخد، اما همواره یک لغزش وجود دارد. در اینجا اگر سرعت روتور برابر با سرعت سنکرون باشد، گشتاوری تولید نمی شود.
سربندی موتورهای القایی:
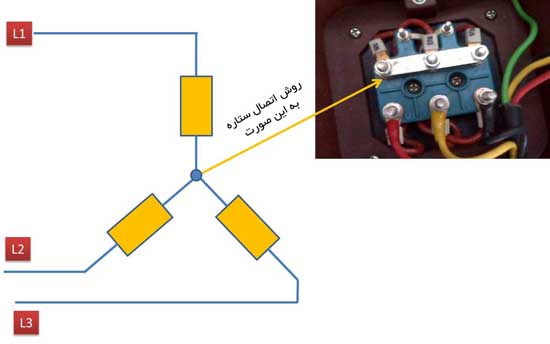
موتور های سه فاز القایی از نوع روتور قفس سنجابی، در مجموع دارای 3 سری سیم پیچ هستند. که در نهایت این سه سری سیم پیچ بر روی بدنه خارجی موتور در قسمتی با نام ترمینال های موتور یا تخته کلمپ جمع می شوند.
در این حالت بر روی تخته کلم موتور ما 6 سر (6 عدد ترمینال) خواهیم داشت.

برای راه اندازی یک موتور سه فاز به سه عدد خط سه فاز نیاز است ولی اینجا 6 ترمینال در دسترس است! راه حل این است که 6 سر اتصال به سه سر تبدیل شود. به همین دلیل سربندی موتور به حالت ستاره یا مثلث بسته می شود. در شکل زیر سربندی ستاره را می بینید.
همچنین روش اتصال ترمینال های موتور به صورت مثلث در شکل زیر آمده است.

سربندی موتور به صورت ستاره یا مثلث برای راه اندازی موتور بسیار مهم است. در برخی موارد از طریق روش ستاره/ مثلث گشتاور راه اندازی را بالا می برند تا در لحظه اولیه موتور زیر بار نماند.
اگر برای راه اندازی موتور از درایو استفاده شود، باید حتماً به پلاک موتور و ورودی درایو توجه کرد . اگر روی پلاک موتور نوشته بود ، 220/380 و از درایوی با ورودی تکفاز 220 استفاده شده بود، باید سربندی مثلث بسته شود و اگر ورودی درایو سه فاز 380 باشد، باید سربندی موتور ستاره بسته شود.
در موتور هایی با پلاک 380/660، از درایو با ورودی سه فاز 380 استفاده شود و سربندی موتور مثلث بسته شود. اگر نیاز به 660 ولت یا ولتاژ بالاتر باشد، باید توسط درایوهای ولتاژ بالا یا ترانس های ولتاژ بالا راه اندازی شود.
